Cable Connector Tensile Tester Application Example
Actuator
RCP4
Controller
PCON-CA
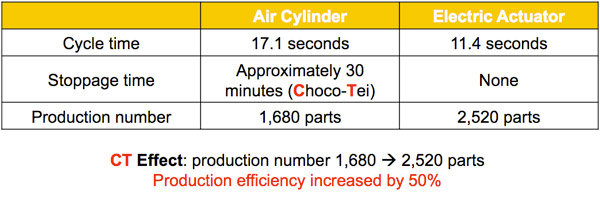
A cable with connectors attached at both ends is tested for tensile strength and is a successful example of how short stoppages (Choco-Tei: CT Effect) were reduced and shorter cycle times were achieved.
One of the connectors is placed into an integrally formed fixture with a fixed base while the connector at the other end of the cable is placed into a fixture which is attached to the moveable slider of the actuator which performs the strength test.
Previously, a worker used a spring and then an air cylinder but pulling the cable slowly was difficult. Stoppages that occurred due to pressure drops when the actuator was in mid-stroke totaled 30 minutes a day.
When the air cylinder was replaced with the RCP4 ROBO cylinder, it is now possible to achieve a constant speed, go to the correct position, and pull the cable with the correct amount of force.
The cycle time is reduced to 5.7 seconds without stoppages. As a result, production increased from 1,680 to 2,520 parts.
Transform your factory with the efficiency-improving, space-saving ERC3 ROBO Cylinder® — Saving space with built-in controller / Supporting wide-ranging operations with longer strokes / Payloads and speeds have been increased by 1.5 times / Most affordable in our ROBO Cylinder® series! * The stainless sheet type and gateway unit have been added to the series!
Note: This catalog release is the PDF version only at this point. Updated IAI Catalog Checklist will be posted when the print version becomes available. Thank you.
The key to reducing production costs is found in CT effects. You may be able to further reduce costs if you look closely at the CT effects. So what exactly are CT effects?
Copper Wire Bobbin Winding Machine Application Example
Controller
PCON-CA
Actuators
RCP4W
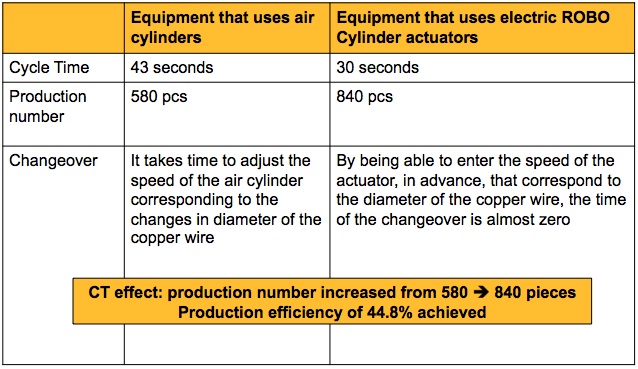
This application significantly reduces the changeover time in a machine that winds a copper wire bobbin.
An actuator is used to wind a bobbin evenly by moving left and right with copper wire that comes out of washing machine. Since a rodless type air cylinder was used in the past, it was used at a reduced speed since the copper wire was damaged and made defective by the jerking of the sudden stops.
Furthermore, in order to change the speed of the air cylinder each time the diameter of the copper wire changes in the changeover, it takes time to adjust the speed controller. Productivity was reduced.
By replacing this rodless air cylinder with a ROBO Cylinder, the movement speed was able to be increased while eliminating any jerking due to stops. In addition, since there are no speed fluctuations due to changes in air pressure, the winding is now good.
An RCP4W dustproof water resistant type of actuator (IP 65) was selected to deal with water droplets that adhere to the copper wire due to the cleaning process.