In the process of machining aluminum parts inside the machining center, ROBO Cylinders have been employed in loading & unloading the work parts.
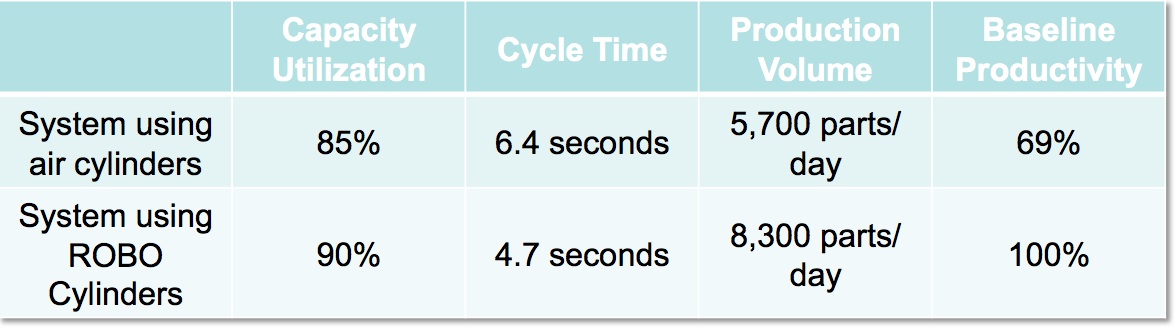
Traditionally, this task had been done manually but will be automated to increase production. Calculations were performed with regard to production volume and cycle time to determine whether using ROBO Cylinders or air cylinders would be most beneficial for the system. The results as shown in the table below indicate that 100% productivity can be realized with ROBO Cylinders while only 69% productivity can be realized with air cylinders.
Running 12 hours per day (60sec/min x 60min/hr x 12 hours = 43,200 seconds)
The number of work parts produced using air cylinders:
(43,200 seconds x 85%)÷6.4 seconds = 5,737 parts
The number of work parts produced using ROBO Cylinders:
(43,200 seconds x 90%)÷4.7 seconds = 8,272 parts
The ROBO Cylinder has been adopted into a machine for measuring the intensity of the LEDs which are placed at regular intervals inside the LED fluorescent shape lamp.
To measure the illumination, the slider moves a light meter to each interval of an LED. The measurement results are managed by a personal computer.
Traditionally, the measurements were conducted manually and there was a variation in the measurement position. By adopting the ROBO Cylinder, the accuracy of the measurement position has been improved.
In addition, by automating, the measurement efficiency was also improved by being able to simultaneously measure three LED fluorescent shape lights at a time.
Pick, Place, and Discharge Machine for Automotive Parts Application Example
Actuators
RCP2-SS8C: Y-axis
RCP4-RA5 (qty:2): Z-axis
Controller
PCON-CA x 3
An orthogonal two-axis robot with Y & Z axes was adopted to pick automotive parts from a conveyor in-feed line, place the part into processing equipment, and then pick & place the part (discharge) to an out-feed line conveyor.
Sequence of Operations:
“A” & “B” (Z-axes) move to the right, “A” picks the work part from the supply side.
“A” & “B” (Z-axes) move to the left, “A” places the work part into the process equipment.
When the process starts, “A” & “B” (Z-axes) move to the right again, “A” picks the work part from the supply side. At the same time “B” will wait until the process equipment is done.
When the process is done, “B” picks and discharges the work part and “A” places the next work part into the processing equipment and the cycle continues.
Air cylinders were previously being used but cannot be sped up because the impact due to stopping is too great.
8,000 work parts were produced per day using air cylinders. Using ROBO Cylinders, the production rate was up to 12,000. The production rate was increased 1.5x.
Also, when the equipment had to stop due to an air cylinder failure, the equipment was down every 10 minutes and was time consuming to fix so it was changed to ROBO Cylinders, and thus limited any downtime due to stoppages.
ROBO Cylinders have been adopted to dispense reagents in chemical inspection equipment.
To prevent dripping the liquid, the plunger is retracted slightly via a pitch feed operation after issuing the liquid by pressing the piston.
Also, returning to the home position due to an emergency stop of the controller is avoided by using the simple absolute type.
Previously, an in-house design was used which took time to create the mechanical design and to program. This effort was reduced and is now possible by using the ROBO Cylinder.
RCP2-SA7C – lateral movement
RCP3-SA5C – vertical movement of the syringe
RCP3-SA3C – vertical movement of the plunger inside the syringe