Introducing a Direct Drive motor achieving high cost-performance — a rotary actuator that directly drives a rotary table with a motor without using any speed reducing mechanism such as a belt or reduction gears. Eliminating the speed reducing mechanism translates to high speed and excellent response, while the compact actuator lets you reduce the size of your equipment.
Note: This catalog release is the PDF version only at this point. Updated IAI Catalog Checklist will be posted when the print version becomes available. Thank you.
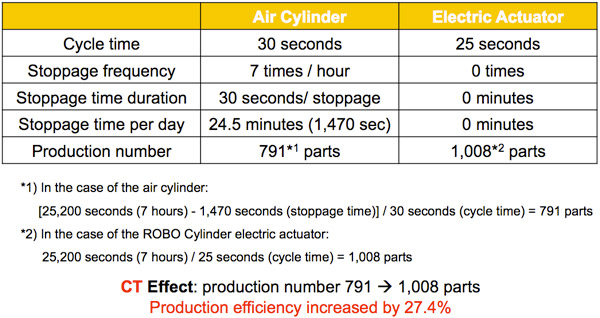
The process step of press fitting a metal pin into a resin ring is a successful example of reducing stoppages and reducing cycle time.
An air cylinder was used in the past but since a pin must be fit by using a constant force slowly, it was difficult to make speed adjustments. Stoppages of seven times per hour occurred due to the pin being damaged during pressing.
By replacing the air cylinder with a ROBO Cylinder, it became possible to press fit at a constant speed such that adjustments were no longer needed. The cycle time has been reduced and damage to the pin in the resin ring has been eliminated.
Once it moves fast to the start of the press fitting operation it is possible to slowly press fit (up to 300kg) by using the ROBO Cylinder. The press fitting is now quick, accurate, and stable which eliminates any stoppages. As a result, the production number per day has increased from 791 parts to 1,008. (Assuming 7 hours of operation per day)
* The stainless sheet type and gateway unit have been added to the series!
For catalog ordering, login into your distributor account at Distributor Login and order via “Catalog Request Form.” Please don’t forget to input your SHIPPING ADDRESS.
Thank you!
Cable Connector Tensile Tester Application Example
Actuator
RCP4
Controller
PCON-CA
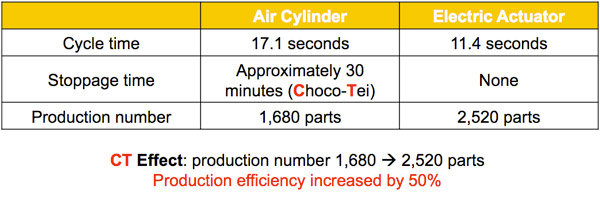
A cable with connectors attached at both ends is tested for tensile strength and is a successful example of how short stoppages (Choco-Tei: CT Effect) were reduced and shorter cycle times were achieved.
One of the connectors is placed into an integrally formed fixture with a fixed base while the connector at the other end of the cable is placed into a fixture which is attached to the moveable slider of the actuator which performs the strength test.
Previously, a worker used a spring and then an air cylinder but pulling the cable slowly was difficult. Stoppages that occurred due to pressure drops when the actuator was in mid-stroke totaled 30 minutes a day.
When the air cylinder was replaced with the RCP4 ROBO cylinder, it is now possible to achieve a constant speed, go to the correct position, and pull the cable with the correct amount of force.
The cycle time is reduced to 5.7 seconds without stoppages. As a result, production increased from 1,680 to 2,520 parts.